Operation
Getting started
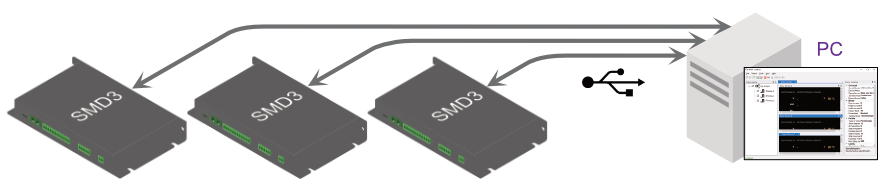
The quickest way to get started with the SMD3, having completed wiring up according to the previous chapter is to install the SMD3 software on your PC (see section 6), power on the SMD3 and connect it with the USB lead to the PC. The SMD3 software provides an intuitive and easy way to configure and evaluate the features of the SMD3 described in the remainder of this section.
This section discusses the various operational modes and configuration options available. The SMD3 software provides easy access to these functions, as well as help text describing each. If communicating with the SMD3 directly, using a terminal program or your own software, see section 7 which lists the commands available.
Operating modes
There are five operating modes:
|
Remote
Accepts commands from host PC or PLC; powerful software supplied, control and configure multiple axes at once. All setup (including mode selection) must be performed using the remote interface. |
Joystick
Ideal for basic movement during commissioning; press for one step, press and hold for continuous movement; latching mode option. |
|
Step/Direction
Opto-isolated step and direction; configurable rising or rising/falling edge; up to 256x interpolation. |
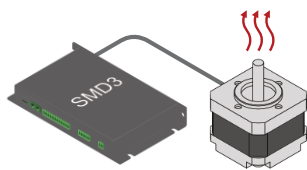
Bake
Heats the motor by energising both phases and holding the motor stationary, regulating the current to achieve a setpoint temperature. Used to drive off adsorbed moisture in the motor. |
|
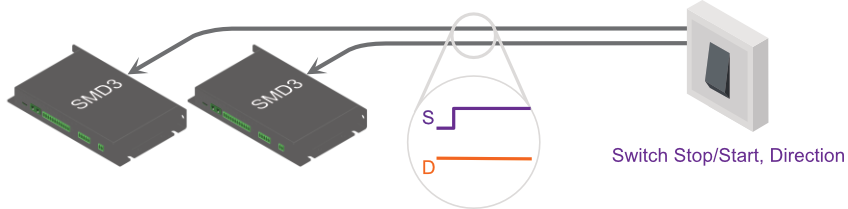
Step/Direction triggered velocity
Start/stop using step signal, Positive/negative movement according to direction signal; configurable velocity profile. |
Home
Home mode drives the motor to the positive or negative limit switch. |
INFORMATION: Mode can be changed only when the motor is not performing any movement. This can be verified by checking the standby flag, which is returned in a status register by the SMD3 on every communication, see section 7.2. The firmware prevents mode change when the standby flag is not set.
In the case of Step/Direction mode, it is the responsibility of the external controller to perform any final activities, such as coming to a stop, before changing the mode.
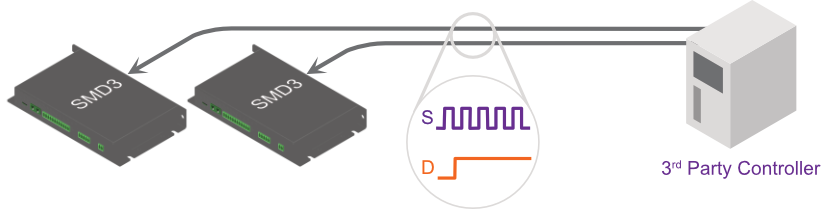
Step/Direction
Motor movement is controlled by externally supplied step and direction signals. The SMD3 can be configured to step on the rising or rising and falling edges, which halves the step clock rate.
Note that the external enable fault is non-latching when in step direction mode; once the external enable state is restored, or the external enable setting is changed to false, normal operation will resume immediately without the need to clear it. See also section X3-I/O.
|
Step input |
|
Direction input |
|||
|
|
Both |
Rising only |
|
|
Meaning |
|
Rising |
Step |
Step |
|
Low |
Positive |
|
Falling |
Step |
|
|
High |
Negative |
Steps are generated according to the current resolution. For example, with the edge setting on rising only, and microstep resolution set to 128, each rising edge on the step input will generate a single 1/128th step in the positive direction.
A step interpolation option is available; when enabled, the step input behaves as it would with the current resolution, except that each step input is interpolated to 256 microsteps. This is done by evaluating the rate at which steps arrive and timing 256 microsteps within the step to step period. This gives all the benefits of microstepping at high resolution while minimising the input clock rate.
The relationship between step input, resolution and actual step frequency is given below:
Motor Step frequency [Hz] = (Step input [Hz] / Resolution)
INFORMATION: Stopping on fractional steps
There is no mechanism to prevent the motor from stopping on fractional steps as there is in all other modes.
Stopping on fractional steps will result in the motor temperature rising much faster than it otherwise would and is generally not suitable for vacuum applications. Therefore, configure the external step generator to meet this criteria.
INFORMATION: Preparation before switching out of Step/Direction mode
When changing to another mode from Step/Direction mode, ensure that any movement being commanded via Step/Direction interface has completed before switching.
Step/Direction triggered velocity
This mode works the same as joystick continuous mode, except that the positive and negative inputs that would normally be supplied via the joystick input are instead generated from the step and direction inputs:
|
Step input |
|
Direction input |
||
|
|
Meaning |
|
|
Meaning |
|
Rising |
Triggers start / stop |
|
Low |
Positive |
|
Falling |
No action |
|
High |
Negative |
Remote
Remote mode is used to perform all aspects of configuration and may also be used to control motor movement directly. The easiest way to do so is using the supplied SMD3 software, which allows one or more SMD3 units to be combined into a system and controlled individually or as a group. This makes it easy to apply the same configuration to multiple devices, for example.
Alternatively, the SMD3 may be controlled via a simple terminal application or your own software. The remote interface is described in section USB interface.
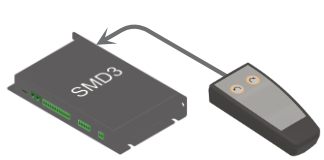
Joystick
Basic motor movements may be commanded via a two-button joystick connected to front panel connector, ‘X6–Joystick’. AML supply the SMD3 Joystick, part number ‘SMD3JOY’ for this purpose. On connection, the SMD3 automatically switches to joystick mode, and reverts to the previous mode on removal of the joystick. This behaviour can be disabled if required. Section X6-Joystick discusses the electrical aspects of the joystick input, including details for building a custom joystick.
There are two joystick modes; both operate using velocity mode (see section Velocity and Positioning Mode for details) in which a profile, including acceleration, deceleration and target frequency are programmed, then motor movement is triggered by the joystick.
|
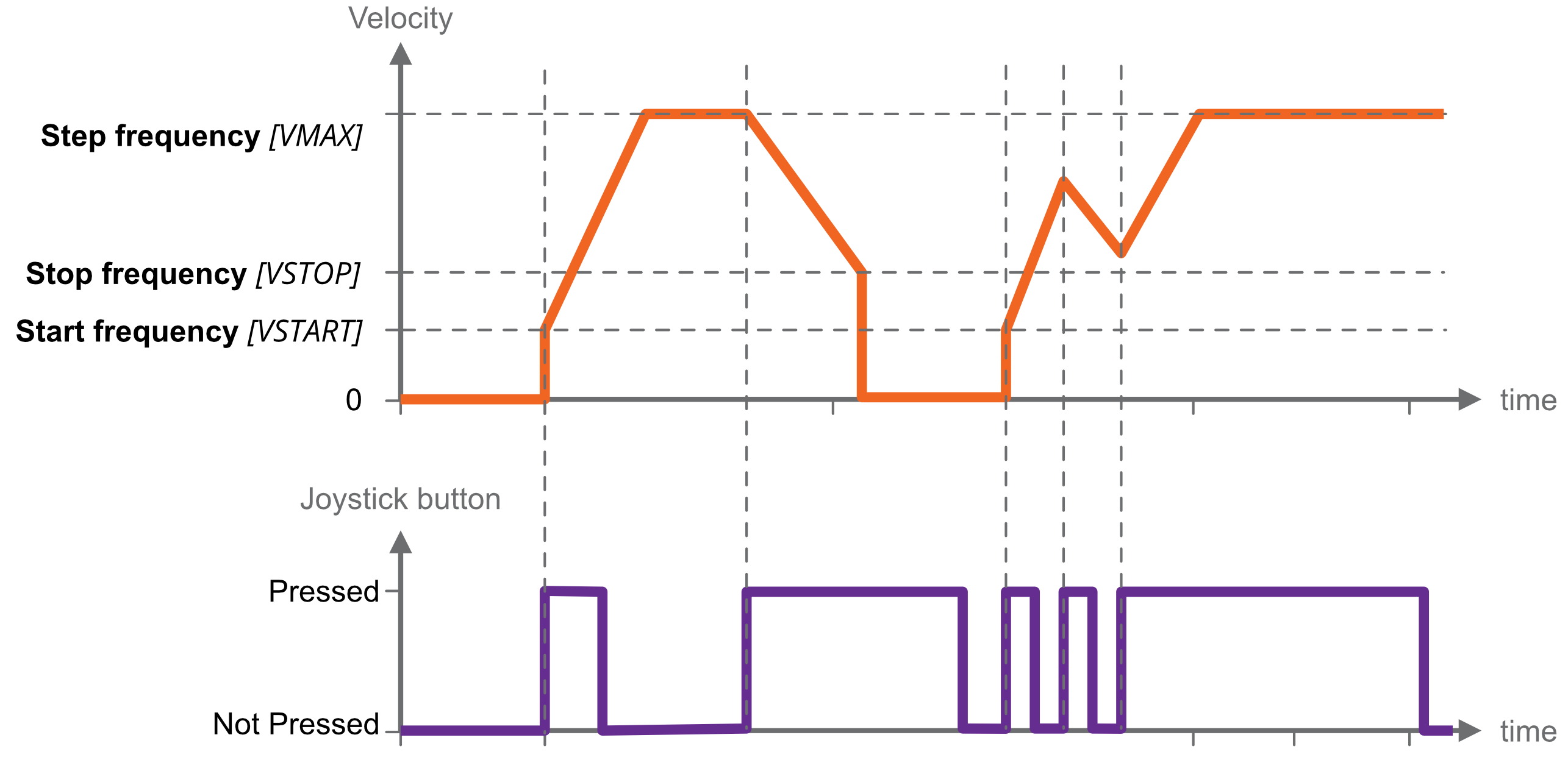
Continous
|
Motor accelerates toward target frequency on joystick key down. Continuing to hold the key down has no further effect.
On releasing and pressing the same key again, the motor decelerates toward a stop.
On pressing the alternate direction key, motor first decelerates to a stop before accelerating toward target frequency in the other direction.
If the motor has not yet come to a stop, and the same key is pressed again, the motor will once more accelerate towards target frequency, as illustrated left. |
|
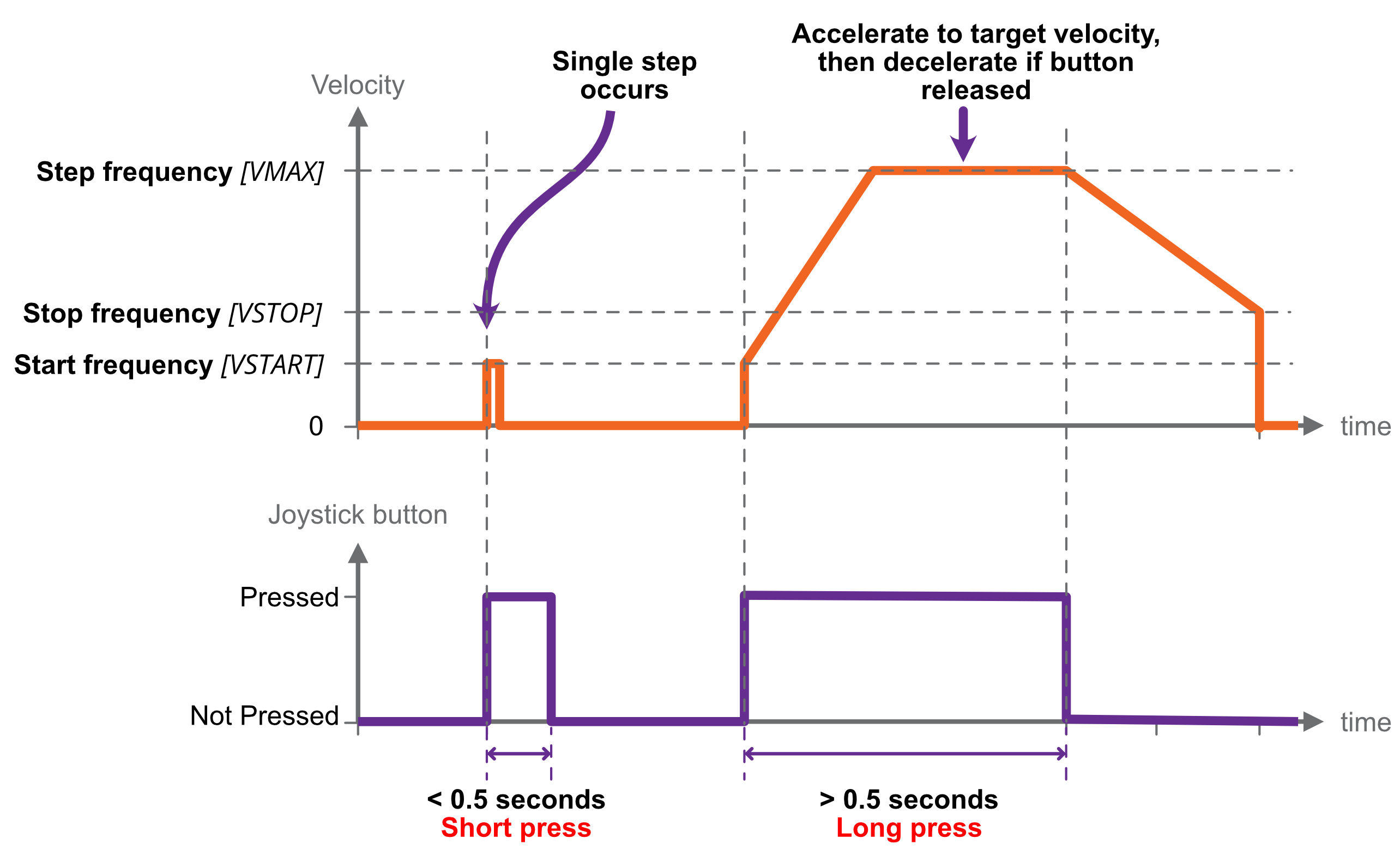
Single step
|
A short button press (< 0.5 s) causes a single step in the commanded direction. This is useful for precise positioning.
A long press (> 0.5 s) triggers acceleration toward the target frequency, while the button continues to be pressed.
Releasing the button causes the motor to decelerate toward a stop.
If the button is pressed while the motor is still decelerating, the motor once more accelerates toward target frequency for as long as the button is held. |
Bake
Bake mode regulates phase current to heat the motor to a specified setpoint temperature. The motor is held stationary. Before engaging bake mode, set the target bake temperature. When in bake mode, the green status indicator will flash briefly at intervals as a reminder that this mode is active.
Home
Home mode drives the motor to the positive or negative limit switch. The motor first moves toward the limit switch using the existing movement profile. On the limit switch being triggered, the step frequency is halved, and the motor reversed until the limit switch is not triggered. Finally, the motor moves toward the limit switch at a step frequency of 30 Hz until the limit switch is triggered.
INFORMATION: Limitations of limits
Limit switches are not latching, i.e. as soon as a limit input becomes not triggered, for example if the mechanism is able to first actuate a limit switch and then continue moving past it until the limit switch is no longer actuated, then the SMD3 will be unaware of this and will continue to drive the motor if commanded.
Limits switches and cams are normally arranged such that the limit switch is triggered from the desired point up to and including the point at which the mechanical limit of the mechanism is encountered.
General concepts
User interface
In general, all control and configuration of the SMD3 is performed via the remote interface. The following functions and indications are available locally on the SMD3:
- Basic status information, via front panel green and red indicators. Green signifies power on and normal operation, red a fault. See section Faults. The green indicator also blinks briefly when the operating mode is changed.
- Joystick control – plug a joystick into the front panel joystick connection, and basic movements may be performed according to the current configuration. See section Joystick.
- Step/Direction interface; if in this mode, the motor may be controlled via signals supplied on the I/O port. See section Step / Direction.
- Fault output and fault reset input on ‘X3 – I/O’ – An open collector fault output is set when a fault occurs. The fault state can be reset by pulling the fault reset pin to the ‘GND’ pin of ‘X3 – I/O’. See section
5.8 for faults.Faults.
Persistence of settings
All changes made to the configuration via the remote interface are volatile (i.e. not retained on power cycling) unless the store command is executed before powering off. The AML SMD3 software warns you of this when closing the application, but if writing a custom application to control the SMD3, your application must handle this if settings are to be persisted.
The SMD3 will always load the last stored settings on power on, or if the store command has not been previously used, defaults are loaded as per section 7.6. If settings become corrupted, for example the write endurance of the memory in which the settings are stored is exceeded, the SMD3 loads defaults as identified above, and a fault indication is given, see section Faults.
Motor current
Microstepping
Freewheel mode
Velocity and Positioning mode
Initiating movement
Monitoring the motor
Enable input
Motor configuration
Temperature sensor selection
AML motors can be supplied with either a K-Type thermocouple or PT100 RTD temperature sensor. Ensure the sensor is connected to the thermocouple (X4 - Thermocouple) or RTD (X3 – I/O, see 4.3.4) input, and make the appropriate selection. The temperature sensor select command [TSEL] allows selection between thermocouple and RTD.
INFORMATION: The motor is disabled if the temperature sensor is misconnected, faulty or the temperature measurement exceeds 190 °C in order to protect the motor from possible damage to the insulation material.
Check that the motor temperature sensor selection matches that of your motor.
Profile configuration
Start and stop frequency
Acceleration and deceleration
Changing direction
Limits
Faults
Types of fault
Clearing a fault
Faults may be cleared using the clear command [CLR], or by pulling the fault reset pin to the ‘GND’ pin on ‘X3 – I/O’.
The external enable fault is non-latching when in step direction mode; once the external enable state is restored, or the external enable setting is changed to false, normal operation will resume immediately without the need to clear it as described above.