Instructions
1. Download the latest copy of the API DLL for your product
Visit the product page for your product and look for the C# API download, for example for the SMD4, visit the link below, and look for the downloads tab at the bottom of the page. https://arunmicro.com/products/smd4-stepper-motor-drive/
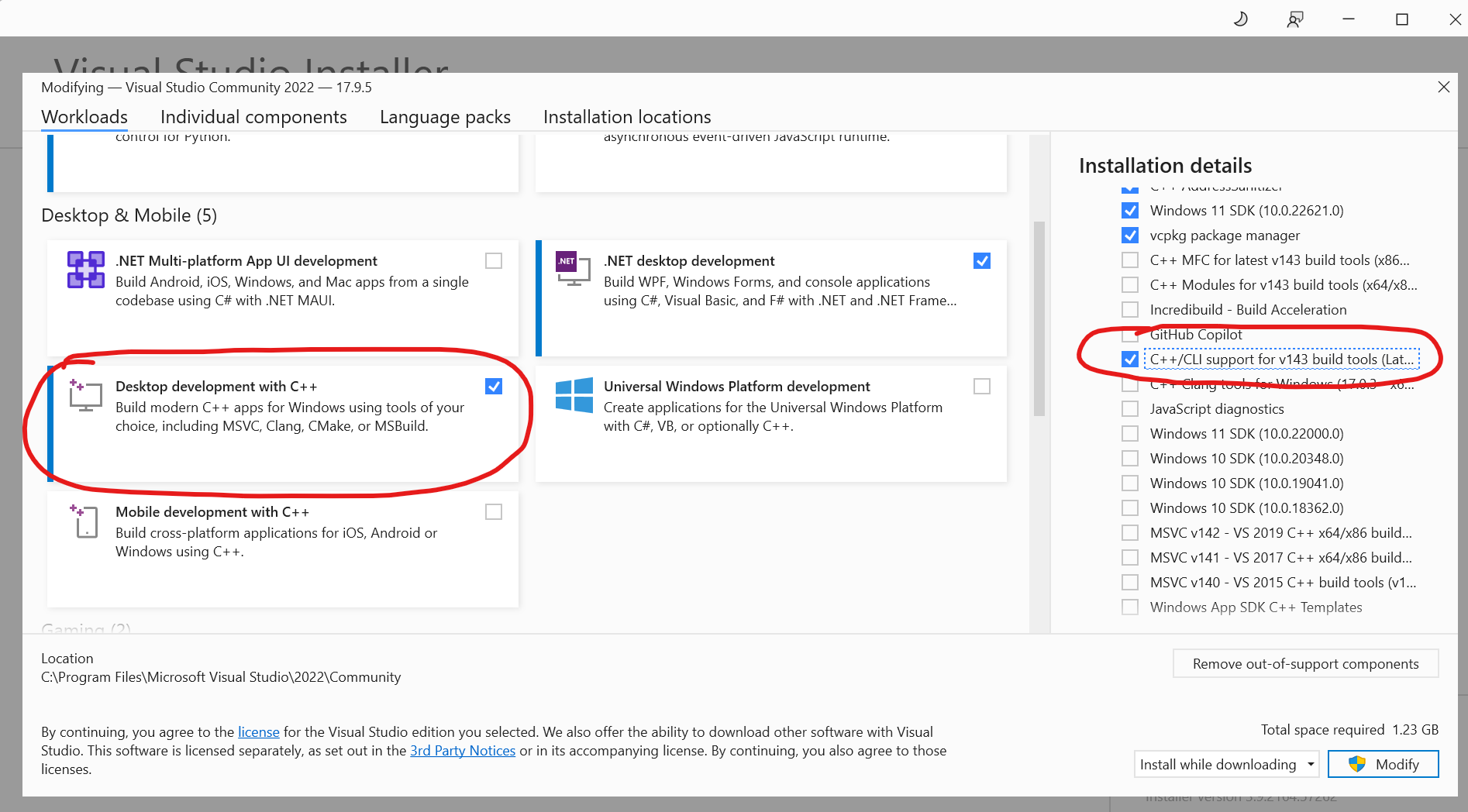
2. Install workloads for Visual Studio
To install a workload, or check what is installed, open Visual Studio and go to 'Tools > Get Tools and Features...'
Install the following workloads:
-
.NET desktop development
-
Desktop development with C++, with the default installation components PLUS the following:
- C++/CLI support for v143 build tools
Use install or modify as required.
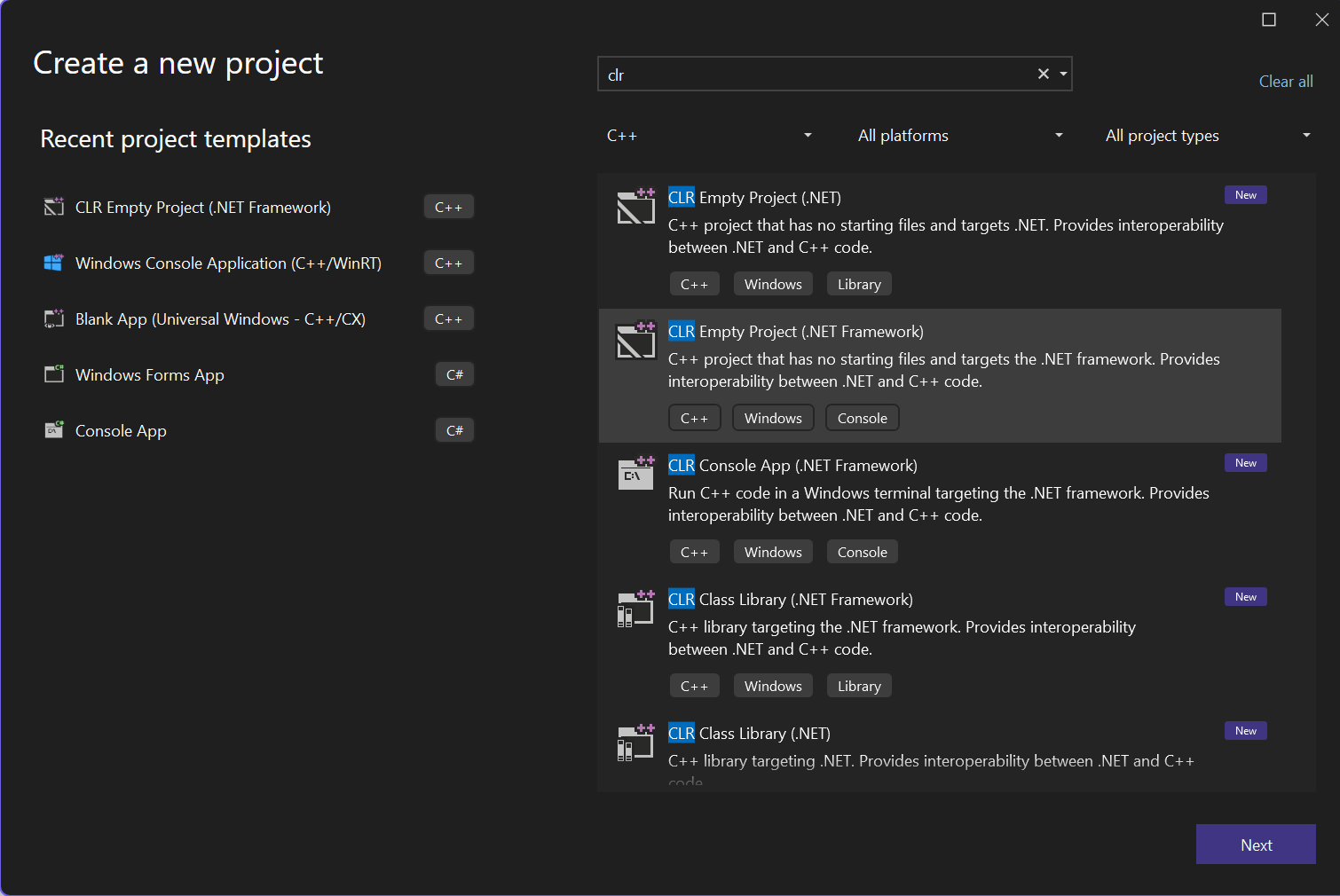
3. Creating the project
Start the new project wizard (File > New > Project). Choose one of the following, then proceed to create your project as normal.
-
CLR Empty Project (.NET Framework)
-
CLR Console App(.NET Framework)
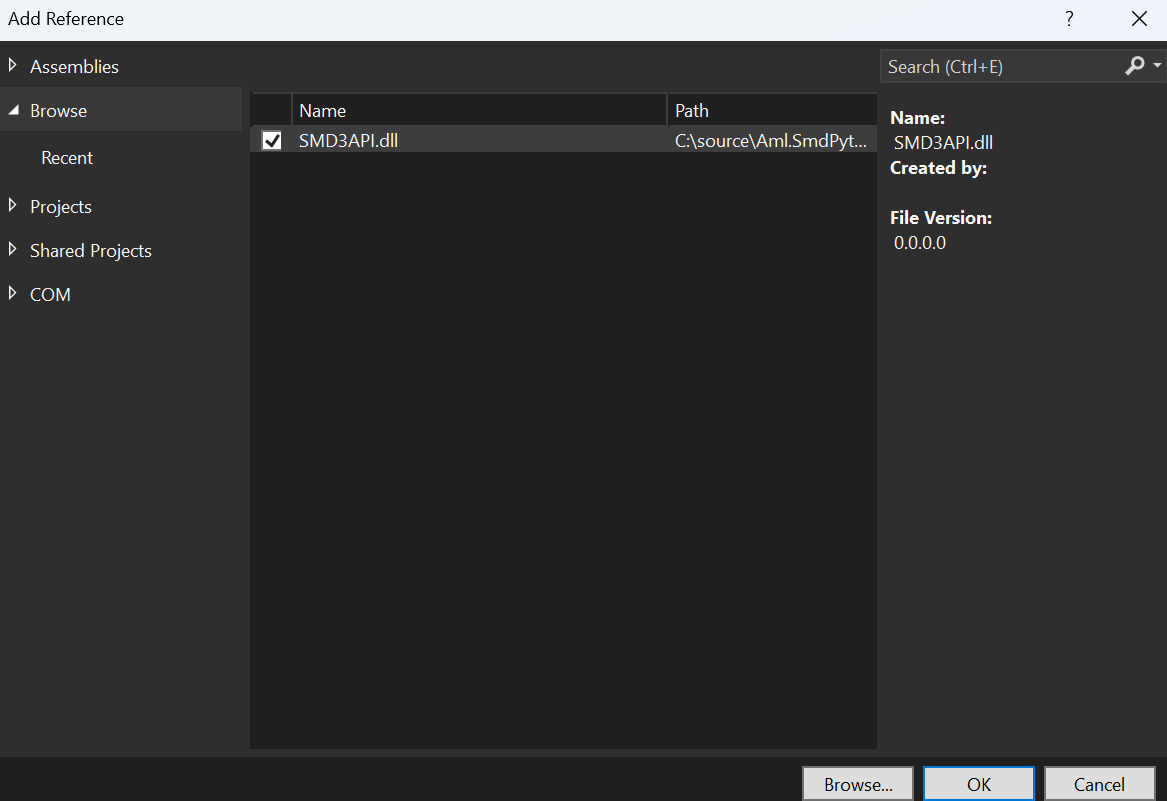
4. Referencing the API DLL file
The API DLL file needs to be referenced in your project. To do this go to:
- Solution Explorer
- Right click on the project, Add > Reference…
- Choose ‘browse’ and select the DLL file you downloaded previously (example below shows SMD3 API)
Finally, click OK and the DLL will be added as a reference to your project.
5. Using the API
Example code (main.cpp), demonstrating connecting and moving the motor.
#include <windows.h>
#include <iostream>
#include <msclr/marshal_cppstd.h> // Include for string conversion
// Include CLR headers
#include <vcclr.h>
#pragma comment(lib, "mscoree.lib")
// Import the mscorlib library
#import "C:\\Windows\\Microsoft.NET\\Framework\\v4.0.30319\\mscorlib.tlb" raw_interfaces_only \
high_property_prefixes("_get","_put","_putref") \
rename("ReportEvent", "InteropServices_ReportEvent")
using namespace System;
using namespace msclr::interop; // Namespace for string conversion
// Main function to use the DLL in a native C++ application
int main() {
try {
// Create a instance of the class SMD3 from SMD3API namespace in the dll
auto smd3 = gcnew SMD3API::SMD3();
// Connect the SMD3 on COM3
smd3->Connect("COM3 TEXT");
// Start motor spinning clockwise
smd3->MoveVelocity("+");
// Wait for user before stopping motor
std::cout << "Press Enter to stop motor" << std::endl;
std::cin.get();
smd3->Stop();
}
catch (Exception^ ex) {
// Convert System::String^ to std::string
std::string errorMessage = marshal_as<std::string>(ex->Message);
std::cerr << "Exception: " << errorMessage << std::endl;
}
return 0;
}