Instructions
1. Download the latest copy of the API DLL for your product
Visit the product page for your product and look for the C# API download, for example for the SMD4, visit the link below, and look for the downloads tab at the bottom of the page. https://arunmicro.com/products/smd4-stepper-motor-drive/
2. Install workloads for Visual Studio
To install a workload, or check what is installed, open Visual Studio and go to 'Tools > Get Tools and Features...'
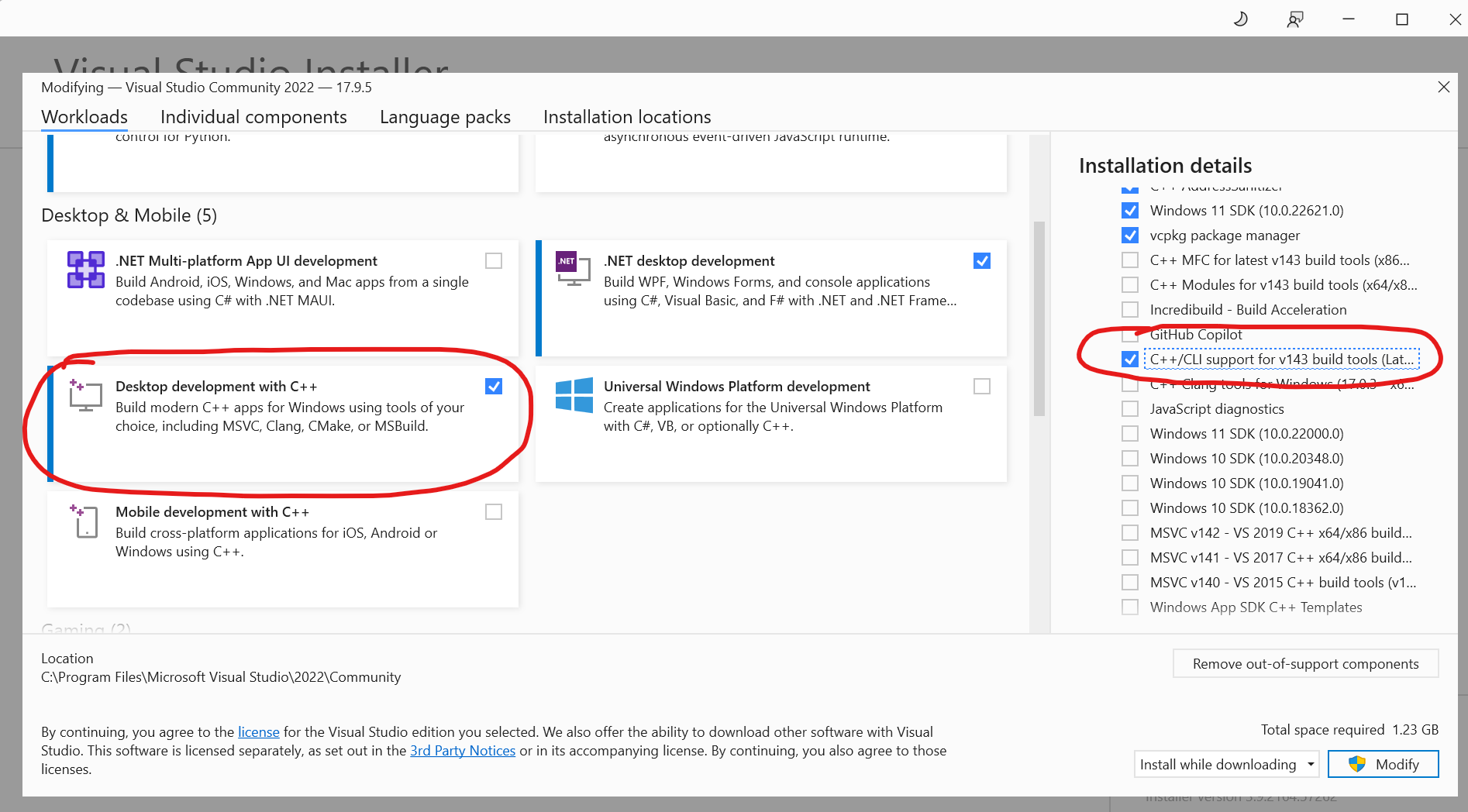
Install the following workloads:
.NET desktop development
Desktop development with C++, with the default installation components PLUS the following:
Use install or modify as required.
3. Creating the project
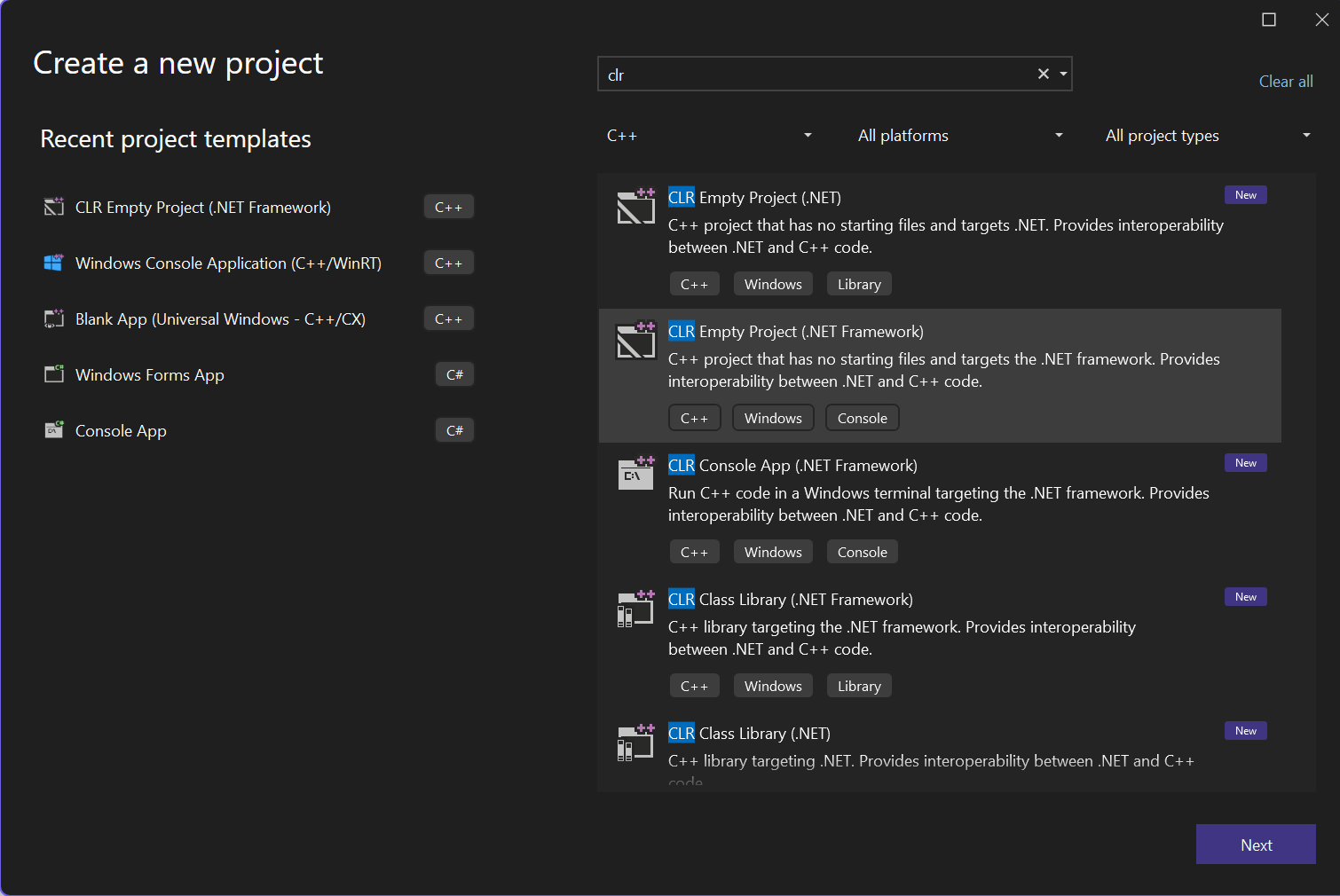
Start the new project wizard (File > New > Project). Choose one of the following, then proceed to create your project as normal.
CLR Empty Project (.NET Framework)
CLR Console App(.NET Framework)
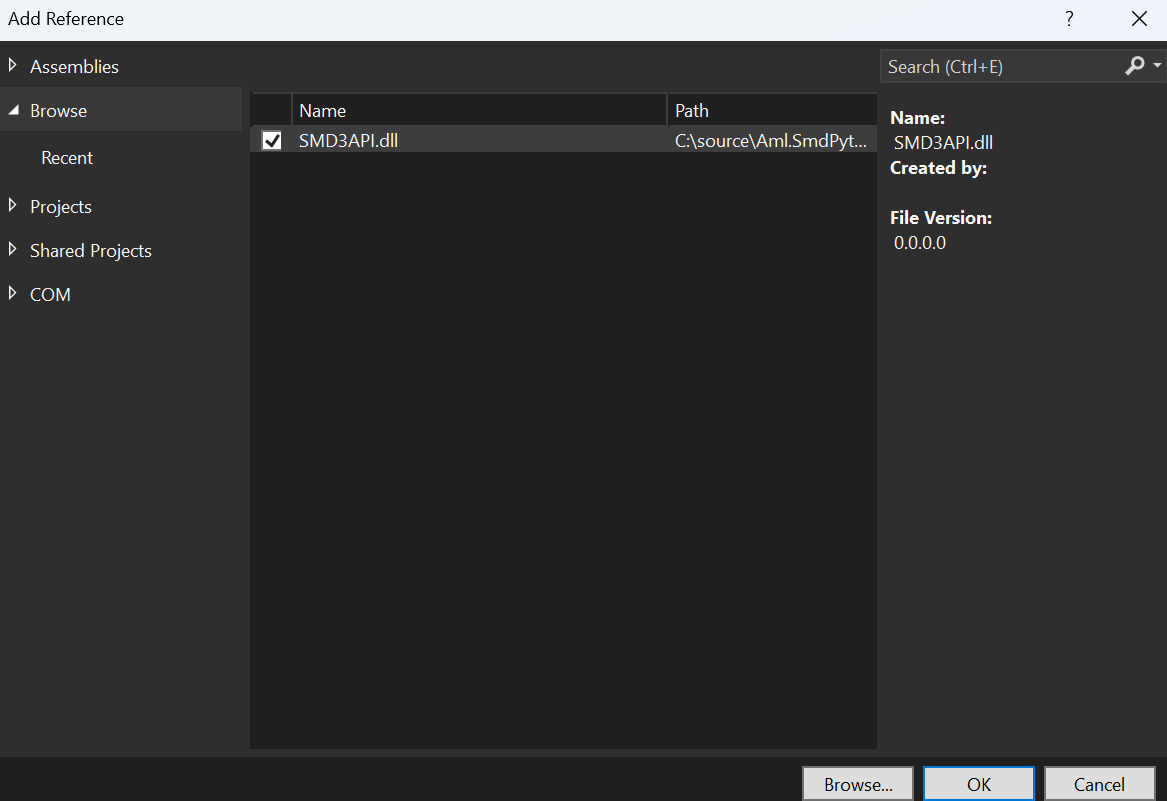
4. Referencing the API DLL file
The API DLL file needs to be referenced in your project. To do this go to:
Finally, click OK and the DLL will be added as a reference to your project.
5. Using the API
Example code (main.cpp), demonstrating connecting and moving the motor.
#include <windows.h>
#include <iostream>
#include <msclr/marshal_cppstd.h> // Include for string conversion
// Include CLR headers
#include <vcclr.h>
#pragma comment(lib, "mscoree.lib")
// Import the mscorlib library
#import "C:\\Windows\\Microsoft.NET\\Framework\\v4.0.30319\\mscorlib.tlb" raw_interfaces_only \
high_property_prefixes("_get","_put","_putref") \
rename("ReportEvent", "InteropServices_ReportEvent")
using namespace System;
using namespace msclr::interop; // Namespace for string conversion
// Main function to use the DLL in a native C++ application
int main() {
try {
// Create a instance of the class SMD3 from SMD3API namespace in the dll
auto smd3 = gcnew SMD3API::SMD3();
// Connect the SMD3 on COM3
smd3->Connect("COM3 TEXT");
// Move a short distance and stop
smd3->MoveVelocity("+");
smd3->Stop();
// Wait for user input before exiting
std::cout << "Press Enter to exit" << std::endl;
std::cin.get();
}
catch (Exception^ ex) {
// Convert System::String^ to std::string
std::string errorMessage = marshal_as<std::string>(ex->Message);
std::cerr << "Exception: " << errorMessage << std::endl;
}
return 0;
}